自考题库
首页
所有科目
自考历年真题
考试分类
关于本站
游客
账号设置
退出登录
注册
登录
出自:国家开放大学《机电控制工程基础》
直流电机换向时会产生火花,要减小火花最有效的方法是装换向极,对换向极要求是()
A:装在几何中心线上
B:磁极的极性与电枢反应磁场相反
C:励磁绕组与电枢绕组串联
D:磁路不饱和
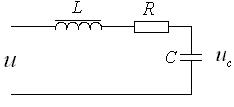
下图为一具有电阻-电感-电容的无源网络,求以电压u为输入,u
c
为输出的系统微分方程式。
根据不同铁磁性材料的磁滞回线宽窄的不同,铁磁性材料可以分为()
A:永久磁铁
B:硬磁材料
C:电磁铁
D:软磁材料
我们把输出量直接或间接地反馈到(),形成闭环参与控制的系统,称作()。
直流电机线圈内部的感应电势e
Q
和感生电流i
Q
都是()
A:直流电
B:交流电
C:整流
D:逆变
反抗转矩恒与转速n取相反的符号。
直流发电机的感应电动势E与其电枢电流Ia的方向关系是()
A:相同
B:相反
C:启动时相同,运行时相反
D:启动时相反,运行时相同
交流电机的磁极数是由绕组中电流的()决定的,改变绕组的联接方法,就可以改变电机的流向,从而改变转向。
A:转速
B:极数
C:流向
D:转向
降低电动机电源电压,则临界转差率将()
A:不变
B:增加
C:降低
D:急速增加
理想微分环节对数幅频特性曲线是一条斜率为()。
A:A
B:B
C:C
D:D
线性系统稳定的充分必要条件是:系统特征方程的根(系统闭环传递函数的极点)全部具有负实部,也就是所有闭环传递函数的极点都位于s平面的左侧。
惯性环节的时间常数越大,则系统的快速性越好。
若系统的开环传递函数为
,则它的开环增益为()。
A:1
B:10
C:5
D:2
用劳斯表判断连续系统的稳定性,当它的第一列系数全部为正数系统是稳定的。
利用相位超前校正,可以增加系统的频宽,提高系统的快速性,但使稳定裕量变小。
自动控制中的基本的控制方式有开环控制、闭环控制和复合控制。
若二阶系统的阻尼比为0.866则系统的阶跃响应上定不是等幅振荡。
有一系统传递函数
,其中K
k
=4。求该系统的超调量和调整时间;
实轴上二开环极点间有根轨迹,则它们之间必有汇合点。
自励发电机是指()
A:他励发电机
B:并励发电机
C:串励发电机
D:复励发电机
E:外励发电机
Ⅰ型系统和开环增益为10,系统在单位斜输入作用下的稳态误差为∞。
若要增大系统的稳定裕量,又不能降低系统的响应速度和精度,通常可以采用()。
A:相位滞后校正
B:提高增益
C:相位超前校正
D:顺馈校正
某单位负反馈系统的闭环传递函数为
试求系统的开环传递函数,并说明该系统是否稳定。
三相异步电动机的最大转矩与定子每相绕组上所加电压的几次方成正比?()
A:1
B:2
C:3
D:4
线性系统稳定,其开环极点均位于s平面的左半平面。
根据直流他励电动机处于制动状态时的外部条件和能量传递情况,它的制动状态分为()
A:反馈制动
B:反接制动
C:能耗制动
D:停车制动
E:位能制动
改变电枢电动势E的方向所产生的反接制动为电源反接制动。
已知二阶系统单位阶跃响应曲线不呈现振荡特征,则其阻尼比可能为()。
A:0
B:0.6
C:0.707
D:1
自动控制就是()人直接参与的情况下,使生产过程的输出量按照给定的规律运行或变化。
根轨迹法就是利用已知的开环极、零点的位置,根据闭环特征方程所确定的几何条件,通过图解法求出K
g
由0→∞时的所有闭环极点。
首页
<上一页
5
6
7
8
9
下一页>
尾页

 ,则它的开环增益为()。
,则它的开环增益为()。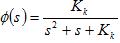 ,其中Kk=4。求该系统的超调量和调整时间;
,其中Kk=4。求该系统的超调量和调整时间;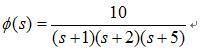 试求系统的开环传递函数,并说明该系统是否稳定。
试求系统的开环传递函数,并说明该系统是否稳定。