自考题库
首页
所有科目
自考历年真题
考试分类
关于本站
游客
账号设置
退出登录
注册
登录
出自:国家开放大学《机电一体化系统设计基础》
提高机械系统的刚度可增加闭环系统的稳定性。
机电一体化产品适应性设计是指改变部分结构尺寸而形成系列产品的设计。
伺服驱动系统是实现电信号到机械动作的转换的装置和部件。
交流伺服电机有哪些类型?交流伺服驱动的主要特点是什么?
简述概念设计的设计过程。
开放式体系结构的主要特点是什么?
微机系统的数据总线中,在任何给定时刻,数据流只允许往一个方向传输。
在机电一体化产品开发性设计是在保持原理方案不变的条件下,对产品功能及结构的重新设计。
直流伺服电动机和永磁同步交流伺服电动机都可以采用PWM控制方式进行控制。
在滚珠丝杠螺母间隙的调整结构中,齿差式调隙机构的精度较高,且结构简单,制作成本低。
在传动系统中,转动惯量增大使机械负载增加,功率消耗大。
增量式光电编码器的输出量为脉冲信号,可以同时用于位置和速度测量。
机电一体化系统的主要功能就是对输入的物质按照要求进行处理,输出具有所需特性的物质。
在传动系统中,转动惯量增大使系统响应速度变慢,灵敏度降低。
由矩频特性曲线可知,步进电机的()小于最大静转矩,并随着脉冲频率的升高而降低。
某车间内的两条自动生产线上需要一款搬运机器人,用于生产线间的产品搬运,如果该款机器人采用概念设计,请制订出概念设计的流程。
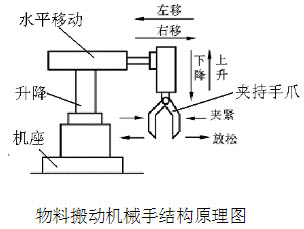
某物料搬动机械手的结构如图所示,动作过程如图所示,要求机械手的操作方式分为手动方式和自动方式。机械手有升降、水平移动、手爪夹持等3个自由度,采用电磁阀控制的气缸驱动,PLC控制。要求写出物料搬动机械手设计和产品开发的详细工程路线。
试述可编程序控制器的功能及组成。
机械系统的刚度对系统的动态特性主要影响表现为()等方面。
A:固有频率、响应速度、惯量
B:固有频率、失动量、稳定性
C:摩擦特性、响应速度、稳定性
D:摩擦特性、失动量、惯量
通常,传感器由()、()和()所组成。
幅频特性和相频特性是模拟式传感器的()。
A:静态特性指标
B:动态特性指标
C:输入特性参数
D:输出特性参数
图示直射式光电转速传感器是一种角位移传感器,由装在被测轴(或与被测轴相连接的输入轴)上的带缝隙圆盘、光源、光电器件和指示缝隙盘组成,光源发生的光通过缝隙圆盘和指示缝隙照射到光电器件上。试分析传感器的测量原理。
在机电一体化系统中,机械传动要满足伺服控制的基本要求足()。
A:精度、稳定性、快速响应性
B:精度、稳定忭、低噪声
C:精度,高可靠性、小型轻量化
D:精度、高可靠性、低冲击振动
频率响应函数是传感器的()。
A:静态特性指标
B:动态特性指标
C:输入特性参数
D:输出特性参数
接口技术是系统技术中的一个方面,它的功能是实现系统各部分之间的可靠连接。
仿真根据采用的模型可以分为计算机仿真、半物理仿真和全物理仿真。
齿轮传动的总等效惯量随传动级数()。
A:增加而减小
B:增加而增加
C:减小而减小
D:变化而不变
滚珠丝杠副具有自锁功能。
什么是伺服系统?伺服系统的一般组成有哪几个部分?
计算机控制系统的采样周期越小,其控制精度就越高。
首页
<上一页
1
2
3
4
5
下一页>
尾页