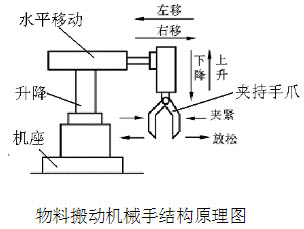
某物料搬动机械手的结构如图所示,动作过程如图所示,要求机械手的操作方式分为手动方式和自动方式。机械手有升降、水平移动、手爪夹持等3个自由度,采用电磁阀控制的气缸驱动,PLC控制。要求写出物料搬动机械手设计和产品开发的详细工程路线。
出自:国家开放大学《机电一体化系统设计基础》
提示:
同一【IP】的非会员用户每天可免费获取10次答案
收藏本站【zk.995w.com】,下次访问不迷路
本站试题总数:【10252937】个 (题库试题定时更新)
提示:
同一【IP】的非会员用户每天可免费获取10次答案
收藏本站【zk.995w.com】,下次访问不迷路
本站试题总数:【10252937】个 (题库试题定时更新)
