自考题库
首页
所有科目
自考历年真题
考试分类
关于本站
游客
账号设置
退出登录
注册
登录
出自:国家开放大学《机电控制工程基础》
已知单位反馈系统开环传函为
,求系统的ξ、ω
n
及性能指标σ%、t
s
(5%)。
交流电机的磁极数是由绕组中电流的转速决定的,改变绕组的联接方法,就可以改变电机的流向,从而改变()。
A:转速
B:极数
C:流向
D:转向
单轴机电传动系统为减速运动时,电机转矩T
M
与负载转矩T
L
之间的关系是()
A:T
M
=T
L
B:T
M
〉T
L
C:T
M
〈T
L
D:T
M
≠T
L
三相异步电动的同步转速值取决于以下哪些因素?()
A:电流频率
B:磁极对数
C:转差率
D:磁场旋转速度
E:三相电流相序
三相异步电动机常使用的调速方式有()
A:调压调速
B:转子电路串电阻调速
C:改变极对数调速
D:变频调速
E:定子电路串电阻调速
若二阶系统的阻尼比为0.65,则系统的阶跃响应为衰减振荡。
如果在扰动作用下系统偏离了原来的平衡状态,当扰动消失后,系统能够以足够的准确度恢复到原来的平衡状态,则系统是稳定的。否则,系统不稳定。
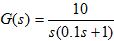
已知系统频率特性为
,则该系统可表示为()。
A:A
B:B
C:C
D:D
改变电动机供电电压的调速方式属于()
A:恒转矩调速
B:恒功率调速
C:匀速调速
D:平稳调速
三相异步电机转子电路串电阻的调速方法适用于以下哪种异步电机?()
A:绕线式
B:鼠笼式
C:深槽式
D:双鼠笼式
已知系统频率特性为
,当输入为
时,系统的稳态输出为()。
A:A
B:B
C:C
D:D
转子磁势也是旋转的,其旋转速度与定子旋转磁势()。
A:同向
B:反向
C:同步
D:异步
一阶系统的阶跃响应有什么特点?当时间t满足什么条件时响应值与稳态值之间的误差将小于5~2%。?
旋转磁场的旋转方向与三相异步电动机三相电流相序的关系是()
A:一致
B:相反
C:相差120度
D:相差90度
二阶系统的两个极点均位于负实轴上,则其在阶跃输入下的输出响应表现为()。
A:等幅振荡
B:振荡发散
C:单调上升并趋于稳态值
D:衰减振荡
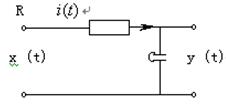
题图中R-C电路的幅频特性为()。
A:A
B:B
C:C
D:D
一个线性定常系统是稳定的,则其开环极点位于S平面左半边。
系统校正的方法,按校正装置在系统中的位置和连接形式区分,有串联校正、并联(反馈)校正和前馈(前置)校正三种。
变压器工作时的额定电流是指在额定电压下规定应提供的电流,对三相变压器而言,均指()
A:相电流
B:线电流
C:当量电流
D:三相电流的平均值
下列开环传递函数所表示的系统,属于最小相位系统的是()。
A:A
B:B
C:C
D:D
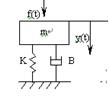
设有一弹簧、质量、阻尼器机械系统,如图所示,以外力f(t)为输入量,位移y(t)为输出量的运动微分方程式可以对图中系统进行描述,那么这个微分方程的阶次是:()。
A:1
B:2
C:3
D:4
什么是PI校正?其结构和传递函数是怎样的?
在以下特殊辅助继电器中,产生初始化脉冲,常用来给计数器或移位寄存器复位的是()
A:M70
B:M71
C:M72
D:M77
对于一个闭环自动控制系统,如果其暂态过程不稳定,系统可以工作。
极坐标图(Nyquist图)与对数坐标图(Bode图)之间对应关系为:极坐标图上的单位圆对应于Bode图上的()线;极坐标图上的负实轴对应于Bode图上的()线。
若使线性化具有足够精度,调节过程中变量偏离工作点的偏差信号必须足够小。
时滞环节的幅相频率特性为一个以原点为圆心的圆。
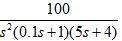
已知系统的传递函数为
,则系统的开环增益以及型次为()。
A:25,Ⅱ型
B:100,Ⅱ型
C:100,Ⅰ型
D:25,0型
为改变三相电机转动方向,常采用以下哪种措施?()
A:对调任两根电源
B:改变通电相序
C:改变转子电流方向
D:改变定子绕线方式
单位阶跃函数的拉氏变换为1。
首页
<上一页
9
10
11
12
13
下一页>
尾页
 ,求系统的ξ、ωn及性能指标σ%、ts(5%)。
,求系统的ξ、ωn及性能指标σ%、ts(5%)。 ,则该系统可表示为()。
,则该系统可表示为()。 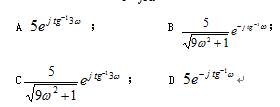
 ,当输入为
,当输入为 时,系统的稳态输出为()。
时,系统的稳态输出为()。 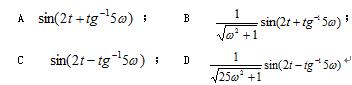

 ,则系统的开环增益以及型次为()。
,则系统的开环增益以及型次为()。