自考题库
首页
所有科目
自考历年真题
考试分类
关于本站
游客
账号设置
退出登录
注册
登录
搜索
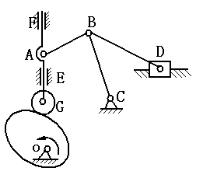
计算图示机构的自由度,并指出复合铰链、局部自由度、 虚约束,判断该机构运动是否确定。
出自:
专升本
显示答案
提示:
同一【IP】的非会员用户每天可免费获取10次答案
收藏本站【zk.995w.com】,下次访问不迷路
本站试题总数:【10252937】个 (题库试题定时更新)