自考题库
首页
所有科目
自考历年真题
考试分类
关于本站
游客
账号设置
退出登录
注册
登录
出自:国家开放大学《机电一体化系统设计基础》
驱动电路中采用脉冲调制(PWM)放大器的优点是功率管工作在开关状态、管耗小。
以下可对交流伺服电动机进行调速的方法是()。
A:改变电压的大小
B:改变电动机的供电频率
C:改变电压的相位
D:改变电动机转子绕组匝数
受控变量是机械运动的一种反馈控制系统称()。
A:顺序控制系统
B:伺服系统
C:数控机床
D:工业机器人
步进电动机的转动惯量越大,同频率下的起动转矩就越大。
在机电一体化产品适应性设计是指改变部分结构尺寸而形成系列产品的设计。
阻尼比除了与机械系统的粘性阻尼系数B有关外,还与系统的拉压刚度系数K0和质量m有关。
完善的机电一体化系统主要包括哪几部分?
典型开关量I/O模板的I/O电气接口的主要功能有()、()、()和()。
直流伺服电动机的调速特性是电机转速与其输出转矩的关系。
阻尼比除了与机械系统的粘性阻尼系数B有关外,还与系统的拉压刚度系数K。和质量m有关。
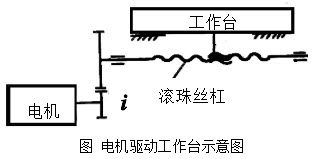
如图所示的电机驱动工作台系统,其中驱动x向工作台的三相双三拍步进电机,转子齿数z为100。滚珠丝杠的基本导程为l
0
=6mm。已知传动系统的横向(x向)脉冲当量δ为0.005mm/脉冲。
第1题,共2个问题
(简答题)试求:步进电机的步距角α。
第2题,共2个问题
(简答题)试求:减速齿轮的传动比i。
为提高闭环系统的稳定性,应增大执行装置的()和系统的阻尼。
PLC控制系统有何优越性?
直流伺服电动机的机械特性是电机转速与其控制电压的关系。
频矩特性表示步进电机()与脉冲频率的关系。
A:额定动态转矩
B:最大动态转矩
C:最大静态转矩
D:最大启动转矩
机电一体化产品不仅是人的手与肢体的延伸,还是人的感官与头脑的延伸,具有“智能化”的特征是机电一体化与机械电气化在功能上的本质差别。
传感器输入特性的主要参数是输入()或()。
增加传动系统的刚度,减小折算的转动惯量,有利于提高系统的响应速度。
对于线控制系统,若要求在达到高精度的同时减小定位时间,则必须提高系统的()。
临界频率是接触式传感器的动态特性指标之一。
机电一体化系统是以微电子技术为主体,以机械部分为核心,强调各种技术的协同和集成的综合性技术。
刚度对开环系统的稳定性没有影响。
以下除了(),均是由硬件和软件组成。
A:计算机控制系统
B:PLC控制系统
C:嵌入式系统
D:继电器控制系统
HRGP-1A喷漆机器人的主要特点是操作机采用()结构,具有3个自由度;驱动器采用(),减轻了示教力;位置测量采用()作传感器,具有较高的伺服精度。
直流伺服电机的驱动电路中,脉宽调制放大器由于管耗大,因而多用于小功率系统。
传感器的静态特性是指输入量为常数时,传感器的输出与输入之间的关系。
迟滞是传感器静态特性指标之一,反映传感器输入量按同一方向做全量程连续多次变动时,输出输入特性曲线的不一致性。
产品的组成零部件和装配精度高,系统的精度一定就高。
机电一体化技术是以()部分为主体,强调各种技术的协同和集成的综合性技术。
A:自动化
B:微电子
C:机械
D:软件
下列哪个是传感器的动特性?()
A:量程
B:线性度
C:灵敏度
D:幅频特性
首页
<上一页
4
5
6
7
8
下一页>
尾页