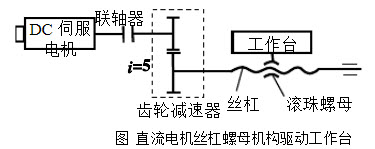
某工作台采用直流电机丝杠螺母机构驱动如图所示,已知电机轴的转动惯量Jm=4×10-4kg·m3,与电机输出轴相连的小齿轮的转动惯量J1=1×10-4kg·m3,大齿轮的转动惯量J2=1.8×10-4kg·m3,丝杠的转动惯量Js=3.8×10-4kg·m3。工作台的质量m=50kg,丝杠导程t=5mm,齿轮减速比为i=5。
第1题,共3个问题
(简答题)试求:工作台折算到丝杠的等效转动惯量JG。
第2题,共3个问题
(简答题)试求:传动件折算到电机轴的等效转动惯量Je。
第3题,共3个问题
(简答题)试求:电机轴上的总转动惯量J。