自考题库
首页
所有科目
自考历年真题
考试分类
关于本站
游客
账号设置
退出登录
注册
登录
出自:西南石油大学土木工程施工与组织(专升本)
单选16 平键联结如不能满足强度条件要求时,可在轴上安装一对平键,使它们沿圆周相隔_____。
·90o
·120o
·135o
·180o
单选17 平带,V 带传动主要依靠______传递运动和动力。
·带的紧边拉力
·带和带轮接触面间的摩擦力
·带地预紧力
单选18 在一般传递动力的机械中,主要采用______传动。
·平带
·同步带
·V 带
·多楔带
单选19 带传动工作时产生弹性滑动是因为_____。
·带的预紧力不够
·带的紧边和松边拉力不等
·带绕过带轮时有离心
·带和带轮间摩擦力不够
单选20 带传动打滑总是____。
·在小轮上先开始
·在大轮上先开始
·在两轮上同时开始
单选21 带传动中,若小带轮为主动轮,则带的最大应力发生在带______处。
·进入主动轮
·进入从动轮
·退出主动轮
·退出从动论
单选22 V 带传动设计中,限制小带轮的最小直径主要是为了_____。
·使结构紧凑
·限制弯曲应力
·保证带和带轮接触面间有足够摩擦力
·限制小带轮上的包角
单选23 带传动采用张紧装置的目的是____。
·减轻带的弹性滑动
·提高带的寿命
·改变带的运动方向
·调节带的预带的预紧力
单选24 链传动中,限制链轮最少齿数的目的之一是为了_____。
·减少传动的运动不均匀性和动载荷
·防止链节磨损后脱链
·使小链轮轮齿受力均匀
·防止润滑不良时轮齿加速磨损
单选25 设计链传动时,链节数最好取_____。
·偶数
·奇数
·质数
·链轮齿数的整数倍
单选26 链传动设计中,当载荷大,中心距小,传动比大时,宜选用____。
·大节距单排练
·小节距多排练
·小节距单排练
·大节距多排练
单选27 链传动的张紧轮应装在_____。
·靠近主动轮的松边上
·靠近主动轮的紧边上
·靠近从动轮的松边上
·靠近从动轮的紧边上
单选28 在机械传动中,理论上能保证瞬时传动比为常数的是_____。
·带传动
·链传动
·齿轮传动
·摩擦轮传动
单选29 一般参数的闭式软齿面齿轮传动主要失效形式是______。
·齿面点蚀
·软齿折断
·齿面磨粒磨损
·齿面胶合
单选30一般参数的闭式硬齿面齿轮传动的主要失效形式是_____。
·齿面点蚀
·软齿折断
·齿面塑性变形
·齿面胶合
单选31 为了减少蜗轮刀具数目,有利于刀具标准化,规定_____为标准值。
·蜗轮齿数
·蜗轮分度圆直径
·蜗杆头数
·蜗杆分度圆直径
单选32 对闭式蜗杆传动进行热平衡计算,其主要目的是为了____。
·防止润滑油受热膨胀后外溢,造成 环境污染
·防止润滑油温度过高而使润滑条件恶化
·防止蜗轮材料在高温下力学性能下降
·防止蜗杆蜗轮发生热变形后,正确啮合受到破坏
单选33 滚动轴承的类型代号由____表示。
·数字
·数字或字母
·字母
·数字加字母
单选34 一角接触轴承,内径 85mm,宽度系列 O,直径系列 3,接触角 15o,公差等级为 6 级,游隙 2 组,其代号为_____。
·7317B/P62
·7317AC/P6/C2
·7317C/P6/C2
·7317C/P62
单选35深沟球轴承,内径 100mm,宽度系列 O,直径系列 2,公差等级为 O 级,游隙 O组,其代号为_____。
·60220
·6220/PO
·60220/PO
·6220
单选36 滚动轴承的额定寿命是指____。
·在额定动载荷作用下,轴承所能达到的寿命
·在额定工况和额定动载荷作用下,轴承所能达到的寿命
·在额定工况及额定动载荷作用下,90%轴承所能达到的寿命
·同一批轴承进行试验中,90%轴承所能达到的寿命
单选37 联轴器和离合器的主要作用是_____。
·联接两轴,使其一同旋转并传递转矩
·补偿两轴的综合位移
·防止机器发生过载
·缓和冲击和震动
单选38对于工作中载荷平稳,不发生相对位移,转速稳定且对中性好的两轴宜选用____联轴器。
·刚性凸缘
·滑块
·弹性套柱销
·齿轮
单选39 对于轴向径向位移较大,转速较低,无冲击的两轴间宜选用_____联轴器。
·弹性套柱销
·万向
·滑块
·径向簧片
单选40 轴环的用途是___。
·作为轴加工时的定位面
·提高轴的强度
·提高轴的刚度
·使轴上的零件获得轴向定位
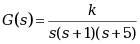
某单位反馈系统的开环传递函数为:
,当k=( )时,闭环系统临界稳定。
·10
·20
·30
·40
设系统的特征方程为
,则此系统中包含正实部特征的个数有( )
·0
·1
·2
·3
单位反馈系统开环传递函数为
,当输入为单位阶跃时,则其位置误差为( )
·2
·0.2
·0.5
·0.05
若已知某串联校正装置的传递函数为
,则它是一种( )
·反馈校正
·相位超前校正
·相位滞后—超前校正
·相位滞后校正
稳态误差ess与误差信号E(s)的函数关系为( )
·
·
·
·
在对控制系统稳态精度无明确要求时,为提高系统的稳定性,最方便的是( )
·减小增益
·超前校正
·滞后校正
·滞后-超前
相位超前校正装置的奈氏曲线为( )
·圆
·上半圆
·下半圆
·45°弧线
开环传递函数为G(s)H(s)=
,则实轴上的根轨迹为( )
·(-3,∞)
·(0,∞)
·(-∞,-3)
·(-3,0)
在直流电动机调速系统中,霍尔传感器是用作( )反馈的传感器。
·电压
·电流
·位移
·速度
系统已给出,确定输入,使输出尽可能符合给定的最佳要求,称为( )
·最优控制
·系统辨识
·系统分析
·最优设计
设一阶系统的传递函数是
,且容许误差为5%,则其调整时间为( )
·1
·2
·3
·4
某一系统的速度误差为零,则该系统的开环传递函数可能是( )
·
·
·
·
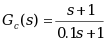
若已知某串联校正装置的传递函数为
,则它是一种( )
·相位超前校正
·相位滞后校正
·相位滞后—超前校正
·反馈校正
正弦输入函数r(t)的数学表达式是 ( )
·
r
·
·
·
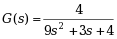
设系统的开环传递函数为,
, 要使系统稳定,K值的取值范围为 ( )
·K>0
·K<40
·0<K<40
·0<K<30
一阶系统
G(s)的单位脉冲响应是y(t) = _______。 ( )
·
·
·
·Ke-t/T
设开环系统的频率特性为G(jω) =
,则其频率特性的极坐标图的奈氏曲线与负虚轴交点的频率值ω_____rad/s。 ( )
·0.1
·1
·10
·2
若系统
具有状态可控性,则常系数a,b的关系应满足 。 ( )
·a-b≠0
·2b2-b-a≠0
·a-b=0
·2b2-b-a=0
系统特征方程为
,则系统 ( )
·稳定;
·单位阶跃响应曲线为单调指数上升;
·临界稳定;
·右半平面闭环极点数
。
系统在
作用下的稳态误差
,说明 ( )
·型别
;
·系统不稳定;
·输入幅值过大;
·闭环传递函数中有一个积分环节。
设二阶振荡环节的频率特性为
,则其极坐标图的奈氏曲线与负虚轴交点频率值
( )
·2
·4
·8
·16
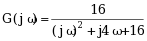
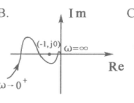
下面最小相位系统的奈氏曲线中,闭环系统稳定的是( )
·
·
vb
·
bv
·
计算根轨迹渐近线的倾角的公式为( )
·
·
·
·
设二阶系统的
,则系统的阻尼比
和自然振荡频率
为( )
·
·
·
·
根轨迹与虚轴交点处满足( )
·
·
·
·
首页
<上一页
133
134
135
136
137
下一页>
尾页
 ,当k=( )时,闭环系统临界稳定。
,当k=( )时,闭环系统临界稳定。 ,则此系统中包含正实部特征的个数有( )
,则此系统中包含正实部特征的个数有( )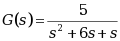 ,当输入为单位阶跃时,则其位置误差为( )
,当输入为单位阶跃时,则其位置误差为( )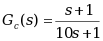 ,则它是一种( )
,则它是一种( )



 ,则实轴上的根轨迹为( )
,则实轴上的根轨迹为( ) ,且容许误差为5%,则其调整时间为( )
,且容许误差为5%,则其调整时间为( )



 ,则它是一种( )
,则它是一种( ) r
r


 , 要使系统稳定,K值的取值范围为 ( )
, 要使系统稳定,K值的取值范围为 ( ) G(s)的单位脉冲响应是y(t) = _______。 ( )
G(s)的单位脉冲响应是y(t) = _______。 ( )


 ,则其频率特性的极坐标图的奈氏曲线与负虚轴交点的频率值ω_____rad/s。 ( )
,则其频率特性的极坐标图的奈氏曲线与负虚轴交点的频率值ω_____rad/s。 ( ) 具有状态可控性,则常系数a,b的关系应满足 。 ( )
具有状态可控性,则常系数a,b的关系应满足 。 ( ) ,则系统 ( )
,则系统 ( ) 。
。 作用下的稳态误差
作用下的稳态误差 ,说明 ( )
,说明 ( ) ;
; ,则其极坐标图的奈氏曲线与负虚轴交点频率值
,则其极坐标图的奈氏曲线与负虚轴交点频率值 ( )
( )
 vb
vb bv
bv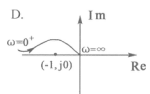




 ,则系统的阻尼比
,则系统的阻尼比 和自然振荡频率
和自然振荡频率 为( )
为( )






